日本HEPHAIST视觉对位平台/UVW平台的参数及移动计算方法
由下述算法由平台相对移动量可算出各执行器(U、V、W)的移动量。
回转中心(at,bt)指的是相对于底座的绝对坐标。
【算法所需的值】
各执行器pin 的初始坐标(固有值)
U执行器:(Ux,Uy)
V执行器:(Vx,Vy)
W执行器:(Wx,Wy)
回转中心 :(at,bt)
现台面位置 (绝对坐标):(X,Y,θ)
台面移动量 (相对坐标) :(X´,Y´,θ´)
【算式】
U执行器移动量
St(u)=((Ux-at)×(sin(θ´+θ)tan(θ´+θ)+cos(θ´+θ))+(bt+(Y´+Y)-Uy)× tan(θ´+θ)+at+(X´+X)-Ux)-((Ux-at)×(sinθtanθ+cosθ)+(bt+Y-Uy)×tanθ+at+X-Ux)
V执行器移动量
St(v)=((Vy-bt)×(sin(θ´+θ)tan(θ´+θ)+cos(θ´+θ))+(Vx-at-(X´+X))×tan(θ´+θ)+bt+(Y´+Y)-Vy)-((Vy-bt)×(sinθtanθ+cosθ)+(Vx-at-X)×tanθ+bt+Y-Vy)
W执行器移动量
St(w)=((Wy-bt)×(sin(θ´+θ)tan(θ´+θ)+cos(θ´+θ))+(Wx-at-(X´+X))× tan(θ´+θ)+bt+(Y´+Y)-Wy)-((Wy-bt)×(sinθtanθ+cosθ)+(Wx-at-X)×tanθ+bt+Y-Wy)
移动后台面位置的绝对坐标
X=X (移动前 X 绝对坐标) +X´
Y=Y (移动前 Y 绝对坐标) +Y´
θ=θ (移动前θ绝对坐标) +θ´
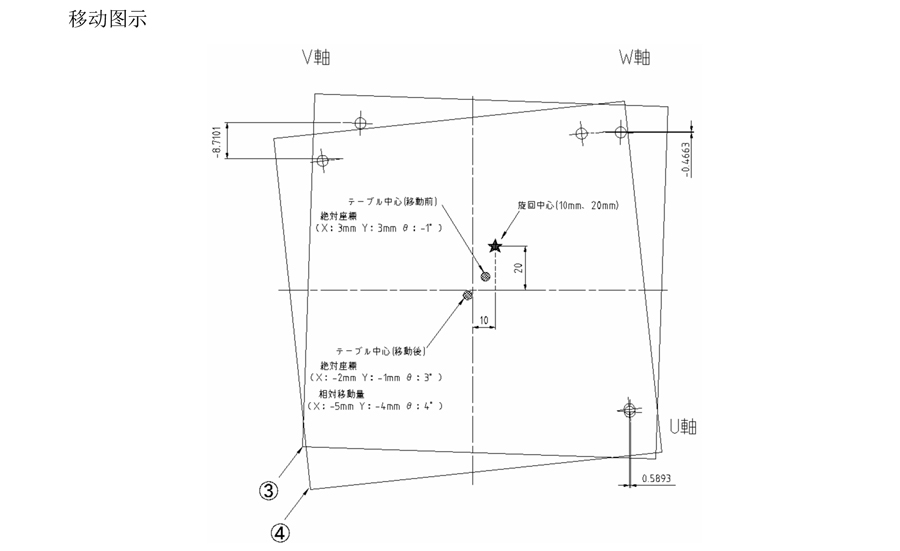
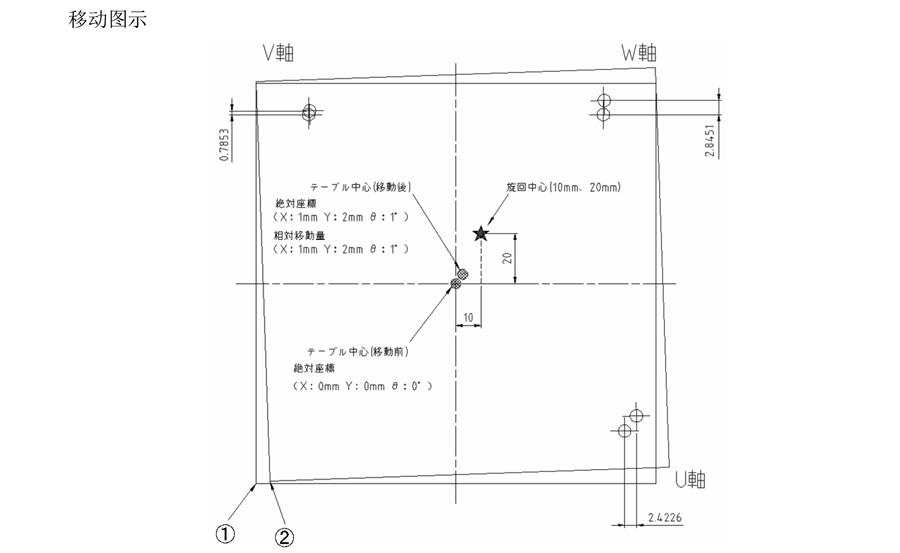
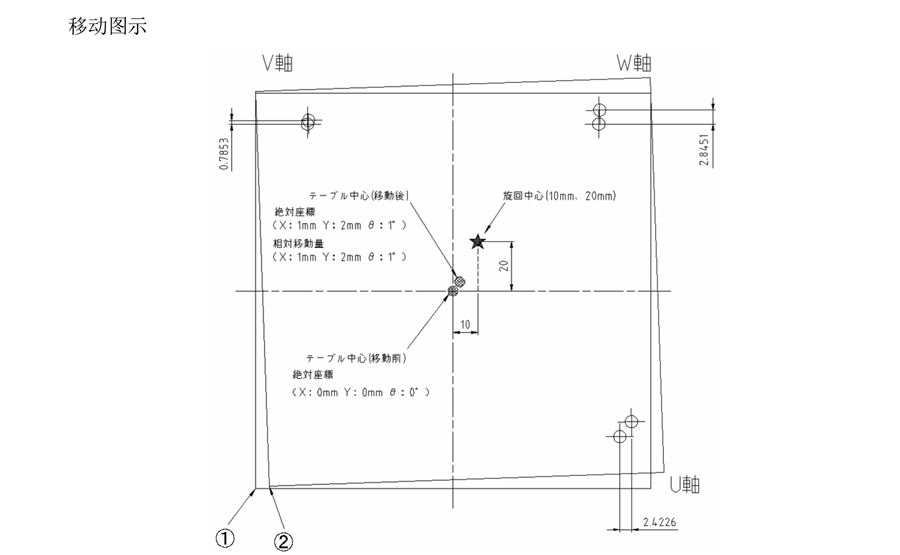
【参考例】
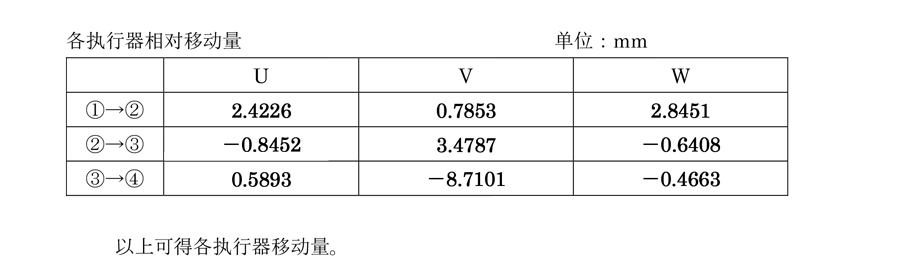
依照表①~④顺序,求得台面移动时各执行器(U、V、W)的移动量。
设置回转中心(at,bt)为(10mm、20mm)。
① 的台面位置视为原点位置。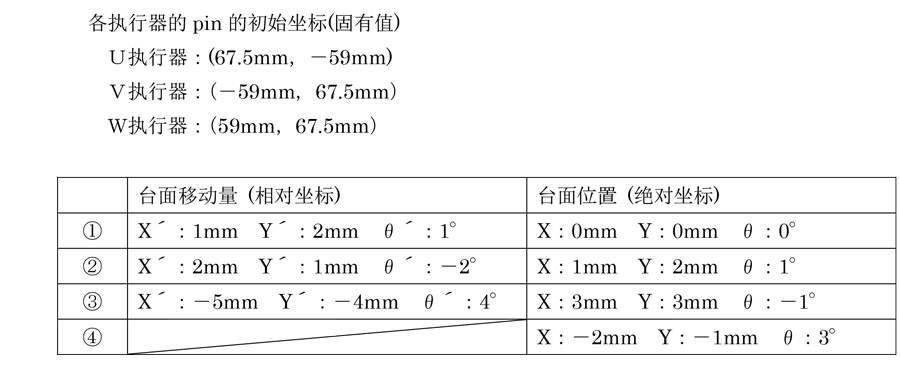
『从①向②移动』
U执行器相对移动量
St(u)=((67.5-10)×(sin(1+0)tan(1+0)+cos(1+0))+(20+(2+0)-(-59))× tan(1+0)+10+(1+0)-67.5)-((67.5-10)×(sin0tan0+cos0)+(20+0-(-59))×tan0+10+0-67.5)
=2.4226mm
V执行器相对移动量
St(v)=((67.5-20)×(sin(1+0)tan(1+0)+cos(1+0))+(-59-10-(1+0))× tan(1+0)+20+(2+0)-67.5)-((67.5-20)×(sin0tan0+cos0)+(-59-10-0)×tan0+20+0-67.5)
=0.7853mm
W执行器相对移动量
St(w)=((67.5-20)×(sin(1+0)tan(1+0)+cos(1+0))+(59-10-(1+0))× tan(1+0)+20+(2+0)-67.5)-((67.5-20)×(sin0tan0+cos0)+(59-10-0)×tan0+20+0-67.5)
=2.8451mm
向②移动时的台面位置 (绝对坐标)
X= 0 + 1 = 1mm
Y= 0 + 2 = 2mm
θ= 0 + 1 = 1°
『②向③移动』
U执行器相对移动量
St(u)=((67.5-10)×(sin((-2)+1)tan((-2)+1)+cos((-2)+1))+(20+(1+2)-(-59))×tan((-2)+1)+10+(2+1)-67.5)-((67.5-10)×(sin1tan1+cos1)+(20+2-(-59))×tan1+10+1-67.5)=-0.8452mm
V执行器相对移动量
St(v)=((67.5-20)×(sin((-2)+1)tan((-2)+1)+cos((-2)+1))+(-59-10-(2+1))×tan((-2)+1)+20+(1+2)-67.5)-((67.5-20)×(sin1tan1+cos1)+(-59-10-1)×tan1+20+2-67.5)=3.4787mm
W执行器相对移动量
St(w)=((67.5-20)×(sin((-2)+1)tan((-2)+1)+cos((-2)+1))+(59-10-(2+1))×tan((-2)+1)+20+(1+2)-67.5)-((67.5-20)×(sin1tan1+cos1)+(59-10-1)×tan1+20+2-67.5)=-0.6408mm
向③移动时台面位置 (绝对坐标)
X = 1 + 2 = 3mm
Y = 2 + 1 = 3mm
θ = 1 + (-2) = -1°
『③向④的移动』
U执行器相对移动量
St(u)=((67.5-10)×(sin(4+(-1))tan(4+(-1))+cos(4+(-1)))+(20+((-4)+3)-(-59))×tan(4+(-1))+10+((-5)+3)-67.5)-((67.5-10)×(sin-1tan-1+cos-1)+(20+3-(-59))×tan-1+10+3-67.5)=0.5893mm
V执行器相对移动量
St(v)=((67.5-20)×(sin(4+(-1))tan(4+(-1))+cos(4+(-1)))+(-59-10-((-5)+3))×tan(4+(-1))+20+((-4)+3)-67.5)-((67.5-20)×(sin-1tan-1+cos-1)+(-59-10-3)×tan-1+20+3-67.5)=-8.7101mm
W执行器相对移动量
St(w)=((67.5-20)×(sin(4+(-1))tan(4+(-1))+cos(4+(-1)))+(59-10-((-5)+3))×tan(4+(-1))+20+((-4)+3)-67.5)-((67.5-20)×(sin-1tan-1+cos-1)+(59-10-3)×tan-1+20+3-67.5)=-0.4663mm
向④移动时台面位置 (绝对坐标)
X = 3 + (-5) = -2mm
Y = 3 + (-4) = -1mm
θ = -1 + 4 = 3°